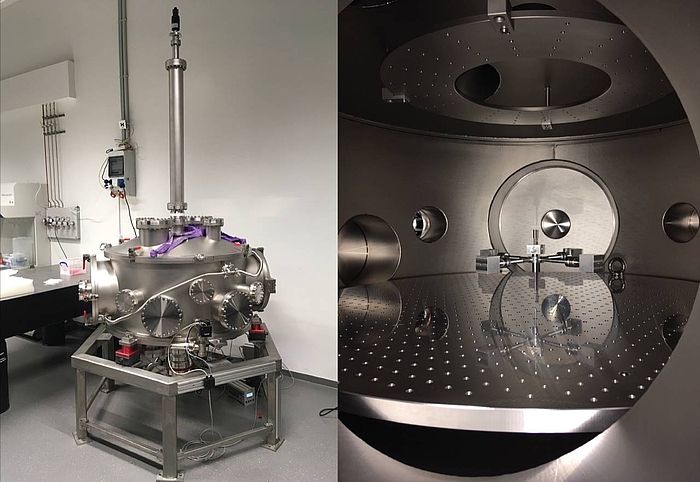
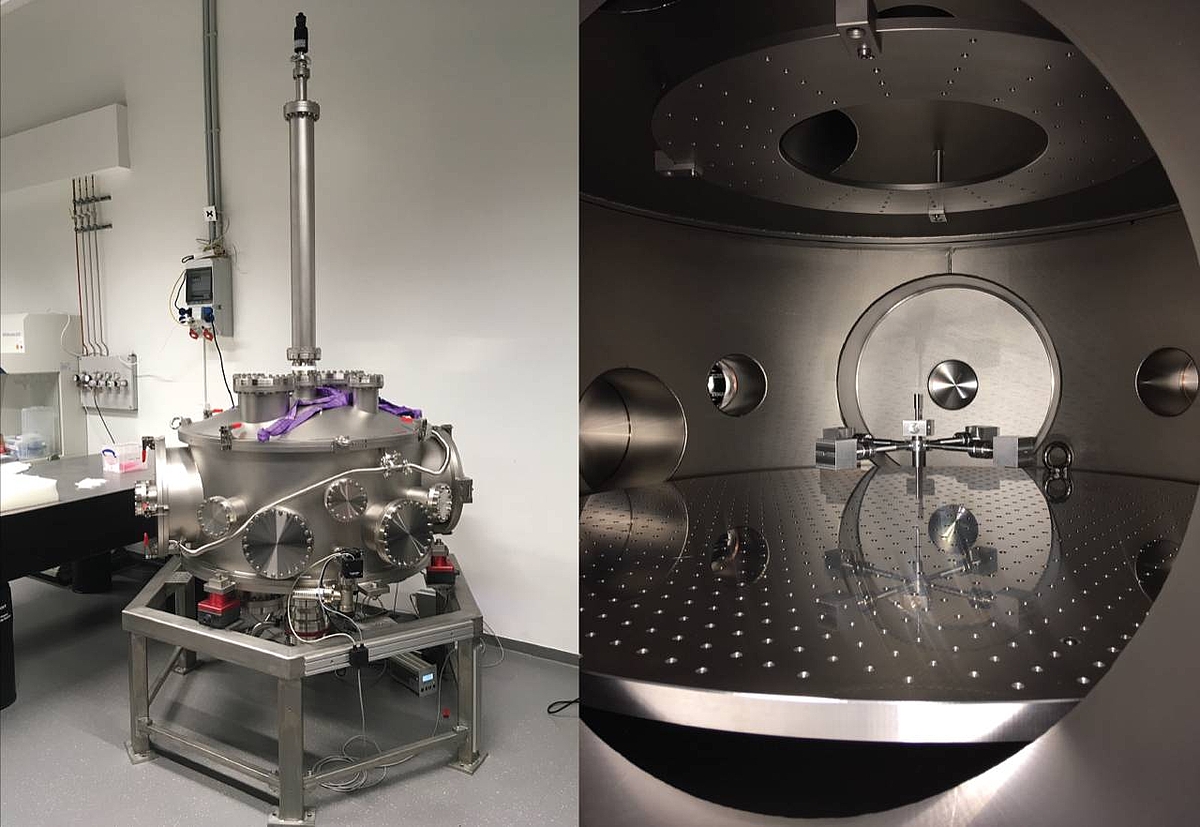
We will measure a first sensitivity curve of the existing torsion balance at the beginning of the first funding period. In this preliminary state we will operate the system with optical lever readout and electrostatic feedback. Operation of a system with a well understood sensitivity will allow us to identify limiting noise sources and characterise the entire system. The main work within the first phase of TerraQ will then be to advance the system towards all interferometric sensing and to realise a torsion balance with a performance well enough to test low-noise payloads. In the first year of TerraQ we will begin noise hunting at the preliminary torsion balance to obtain a well-understood noise budget and to identify the limiting noise sources. The thermal and seismic properties of the system will be investigated and we will devise suitable mitigation and control schemes/strategies. As seismic noise is most likely among the limiting noise sources, a first version of the tilt compensation control loop, using the pendulum itself with its optical lever as the tilt sensor, will be implemented and the performance will be analysed. The analysis will include measuring the relative dynamics between the extremely quiet test mass and the environment from which, in turn, interesting observations such as 5 degrees of freedom low frequency seismic dynamics can be obtained. In the second year of TerraQ we will begin the transition to a high-precision readout system. This readout system will be based on the integration of interferometric sensors for the pendulum torsional mode and the (unwanted) swing modes. These are excited via the coupling of environmental vibration, mainly caused by seismic motion, which is known to cause excess noise in the measurement band. The interferometric system will replace or complement the existing optical lever readout and will be used to generate a feedback signal for closing a control loop to counteract the effects due to motion of the torsion-fibre suspension point. As actuators we will implement a set of heavy-duty piezo-electric transducers below the vacuum chamber that are able to move the entire experimental platform.

 ©
Moritz Mehmet
©
Moritz Mehmet
A second interferometric readout will be devised for the pendulum torsion mode, which will be the basis for replacing or extending the optical level readout of the sensitive degree of freedom with a highprecision sensing device. Here, our project will benefit from the development of scalable, high-precision interferometric sensors in B05, which we will adapt for the sensing within our infrastructure. We will define the required number of degrees of freedom for the Deep Frequency Modulation Interferometry (DFMI)-based readout system and identify mechanical and optical interfaces for integration into the torsion balance. Other techniques include highly compact, optomechanical inertial motion sensors, which can be arranged in small arrays for high accuracy multi-degree of freedom sensing. This technology will be transferred to this project and TerraQ through the Mercator Fellow Dr. Felipe Guzmán. The use of these inertial sensors offers us the possibility for real-time measurement of the mechanical dynamics of the experimental platform. This information can be used for post-correction of the torsion balance output data which, by nature, is a relative measurement between the suspended pendulum and its mechanical frame. Furthermore, the sensors can be vacuum compatible and therefore could be installed both inside the vacuum chamber or on the outside. The first application of the torsion balance will be to test the performance of the compact multi-channel sensor from project B05, which we envision to be installed as the first device under test at the end of the fourth year. This sensor characterisation will be the basis for finding ways and strategies for further improving their performance.
Objectives of B06 - Optical Control of a Torsion Balance as a Low-Noise Test Platform
[Translate to English:]
- Develop novel interferometric and optomechanical sensors to improve the sensing & control capabilities of torsion balances allowing to study central components of future satellite gravity missions
- Establish laser-interferometric sensing as the primary readout technique for a torsion balance
- Create a test bed with a suitable sensitivity to develop and test next generation test masses with optical sensing











